
·运动控制实验室
发展目标:机器人系统实验室以仿生学机理、传感与图像、伺服驱动、先进控制、轨迹规划、自主决策、模块化设计、机电耦合与系统集成技术为基础,致力于仿生机器人、助老助残机器人、特殊环境下的遥操作机械臂、医疗康复机器人、大型机器人自动化生产线系统集成、低成本工业机器人的前沿基础理论和产业化应用研究。实验室重视人才的引进与培养,目标是集聚一批有能力冲击和占领世界科技前沿的科学家和工程技术专家队伍。目前,已基本形成了一支以特聘院士、研究员为学术带头人,研究生、本科生为骨干的高素质科研团队。年轻充满活力,倡导自主探索和实际应用相结合的理念。知识结构合理、创新意识强是这支队伍的鲜明特征。
实验设备:老人服务机器人、3D激光动态测试系统、步态行走机器人、测力机器人、移动机器人开发平台、码垛机器人示范工作站、装配机器人示范工作站、焊接机器人示范工作站、三自由度嵌入式系统、工业取料柔性机械手、仿人手大负载服务机器人手爪、多轴运动控制开发平台。
承担项目:老人服务机器人、测力机器人、4轴混联搬运机器人、可穿戴型助残助老智能机器人、大型国际合作项目ITER热核聚变反应堆机器人运装车、导览机器人、包装码垛机器人、基于嵌入式系统的工业取料柔性机械手、仿人手大负载多用途机器人欠驱动手爪、基于皮肤运动仿变形虫运动机器人、多工位码垛机器人。

图一、服务机器人图片

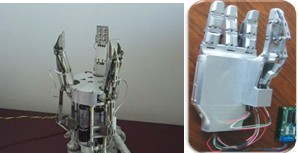
图二、取料机械手抓与手抓

图三、仿生机器人

图四、机器人自动化生产线
·机电工程实验室
发展目标:实验室以发展工业和特种环境下的自动检测及控制技术为目标,致力于新型传感与检测技术,智能信息实时处理技术、自动化控制理论与技术、计算机数字仿真技术等的研究。实验室帮助企业进行工业自动化生产线系统集成和改造,新型智能化仪器仪表开发,电磁兼容检测服务等,采用新技术新方法提升传统制造业的技术水平,带动长三角区域先进装备产业的发展。 人才队伍:目前实验室现有人员13名,引进中科院合肥物质科学研究院在自动化工程方面的专家作为学术带头人,以高级工程师、博士、硕士、本科作为技术骨干,建立了一支高效、精干、肯钻研、创新能力强的研究与开发队伍。 实验设备:实验室先后配置了SG-5010B雷击浪涌发生器1台、EFT-4002群脉冲发生器1台、E4405B频谱分析仪1台、MSO6054A示波器1台、33250A函数任意波形发生器1台、GMD4004A四轴运动控制开发平台1套、GDM/JB高低温湿热交变实验箱1套等共25套先进的自动化检测仪器设备。 承担项目:高精度金属分离器产业化项目、新型智能化数控衬纬经编机研制、智能高频手术器研制、机器视觉质量检测分拣系统、智能纬密仪项目、汽车油位霍尔传感器项目、青藏铁路冻土区监测的无线传感器网络节点研究、数字找平仪项目、公路摊铺机控制器项目、太阳能智能追踪器等项目。

图1 仪器设备

图2 研发项目
·机器视觉实验室
发展目标:实验室以发展工业检测领域的机器视觉应用技术为主要目标,致力于精敏视觉传感器、高速图像处理、智能图像识别的研究、开发与应用,重点解决半导体电子、印刷包装、机械制造、塑料制品、医药医疗等行业产品的表面缺陷检测、外观尺寸测量、高速目标定位、自动目标识别中的关键技术问题,大力推进机器视觉技术的广泛应用,在解决企业技术难题、培养高技术人才,尤其是促进科技成果转化等方面满足国家,特别是地方经济建设与社会发展的需求。
人才队伍:目前实验室现有科研人员10名,通过引进机器视觉研究方面的专家作为学术带头人,以博士、硕士、本科作为技术骨干,形成领域明晰、配置合理的人才梯队,建立了一支高效、精干、肯钻研的研究和管理队伍。
实验设备:NI智能相机及图像处理系统1套, MSU-130同轴平行光源1套,AVT数字工业相机Guppy Pro F-201B 1套,大恒相机DH-HV-1300FM 1套,Computar FA镜头若干,各种环形、同轴照明光源。
承担项目:纽扣电池快速分拣系统、轨道用车轮表面缺陷检测系统、老人服务机器人双目视觉系统、快速跟踪智慧眼系统、混联机器人LED定位贴片系统等。

图一、实验室设备

图二、实验室项目